基于单片机的运动导航系统研究与软件设计
运动导航系统是现代智能设备与自动化控制领域的关键技术之一,其在机器人、无人机、可穿戴设备及辅助驾驶系统中具有广泛的应用前景。本文聚焦于基于单片机的运动导航系统,探讨其核心原理、硬件架构,并重点阐述其软件设计与开发过程。
一、 引言
运动导航系统的核心在于通过传感器(如陀螺仪、加速度计、磁力计、GPS模块等)实时采集运动数据,经由特定的算法进行处理与融合,最终解算出载体(如机器人或设备)的姿态、位置、速度等导航信息,并据此进行路径规划或运动控制。单片机作为系统的主控制器,因其体积小、功耗低、成本效益高且具备强大的实时处理能力,成为实现嵌入式运动导航的理想选择。
二、 系统总体架构
一个典型的基于单片机的运动导航系统通常由以下几个模块构成:
- 感知模块:负责采集原始数据。通常包括MPU6050(集成陀螺仪和加速度计)、HMC5883L(磁力计)用于姿态测量,以及NEO-6M(GPS模块)用于获取绝对位置信息。
- 核心处理模块:即单片机(如STM32系列、Arduino Mega等),它是系统的“大脑”,负责运行导航算法、数据融合与逻辑控制。
- 算法与软件模块:这是系统的核心智能部分,运行于单片机之上,包括传感器数据预处理、姿态解算算法(如互补滤波、卡尔曼滤波)、位置解算、路径规划与控制逻辑等。
- 通信与交互模块:如UART、I2C、SPI用于传感器与单片机通信,以及可能的无线模块(如蓝牙、Wi-Fi)用于与上位机或用户端进行数据交互与调试。
- 执行机构:如直流电机、舵机等,根据导航指令驱动载体运动。
三、 软件设计与开发核心内容
软件设计是赋予硬件“智能”的关键,其开发需遵循嵌入式系统软件设计的一般原则,并针对导航应用的特殊性进行优化。
1. 软件开发环境与架构
- 开发环境:通常基于Keil MDK、IAR Embedded Workbench或Arduino IDE等集成开发环境,使用C/C++语言进行编程。
- 软件架构:推荐采用模块化、层次化的设计思想。底层为硬件驱动层(传感器驱动、通信协议驱动等);中间层为算法处理层(数据融合、导航解算);上层为应用逻辑层(任务调度、控制决策)。这种结构提高了代码的可读性、可维护性和可移植性。
2. 关键算法设计与实现
- 传感器数据预处理:包括零偏校正、标度因数补偿、数字滤波(如滑动平均、低通滤波)以降低噪声。
- 姿态解算:利用加速度计和磁力计数据计算载体的倾斜角和航向角,结合陀螺仪数据进行动态补偿。互补滤波算法实现简单、计算量小,适合单片机资源有限的环境;扩展卡尔曼滤波(EKF)精度更高,但算法复杂,对单片机算力要求也更高,需根据具体需求权衡选择。
- 位置与速度解算:对于GPS数据,进行解析与融合;对于纯惯性导航,则通过对加速度进行二次积分获得位移,但误差会随时间累积,通常需与GPS或其它绝对定位信息进行融合。
- 数据融合策略:设计有效的多传感器信息融合算法(如松耦合或紧耦合的GPS/INS组合导航算法),是提高系统精度和鲁棒性的核心。
3. 实时任务调度与中断管理
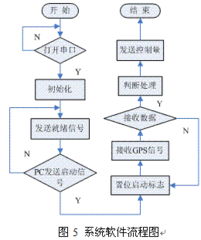
导航系统对实时性要求较高。软件设计需合理规划任务:
- 高优先级任务(中断服务程序):用于处理传感器数据的定时采集(如通过定时器触发ADC采样或读取I2C数据)。
- 中等优先级任务:执行核心的导航解算算法,周期运行。
- 低优先级任务:处理用户交互、数据记录或无线通信等。
利用单片机的定时器、中断控制器和实时操作系统(如FreeRTOS、μC/OS-II)或基于前后台系统的手动调度机制,可以有效管理这些任务,确保系统的实时响应。
4. 系统调试与性能优化
- 调试手段:通过串口将关键数据(如原始传感器值、解算后的欧拉角、位置坐标)实时发送至上位机(如使用Serial Plotter、MATLAB或自行编写的上位机软件)进行可视化分析,是调试算法、验证精度的有效方法。
- 优化策略:针对单片机资源受限的特点,需对算法进行定点化、查表法、循环展开等优化,在保证精度的前提下减少计算量和内存占用。优化电源管理代码以延长电池续航。
四、 结论
基于单片机的运动导航系统是一个集硬件集成、算法创新和软件工程于一体的综合性课题。成功的软件设计不仅要求开发者深入理解导航原理和传感器特性,更需要熟练掌握嵌入式C/C++编程、实时系统设计和算法优化技巧。通过模块化的软件架构设计、高效的导航算法实现以及精细的实时任务调度,可以构建出稳定、精确且成本可控的嵌入式运动导航解决方案。随着单片机性能的不断提升和AI算法在边缘端的部署,此类系统的智能化水平和自主决策能力将得到进一步增强。
(注:本文为技术概述,具体实现需根据选定的单片机型号、传感器型号及具体应用场景进行详细设计与编码。)
如若转载,请注明出处:http://www.daxiaqiche.com/product/2.html
更新时间:2026-06-19 19:29:47